![]() ----------- Your trusted
source for independent sensor data- Photons to Photos------------------------ Last revised:
2019-06-19
----------- Your trusted
source for independent sensor data- Photons to Photos------------------------ Last revised:
2019-06-19
---------------------------------------- Bad Pixel Detection
--------------------------------------------------------- By Bill Claff
Introduction
With many millions of pixels in a sensor array; bad pixels
are inevitable.
Although commonly called "hot pixels" we shall see that not all bad
pixels are "hot".
In this article we'll learn how a pixel is expected to operate, what can go
wrong, and I'll demonstrate an objective way to locate bad pixels as well as
measure how "bad" those pixels are.
Responsivity
Here is a chart that shows the responsivity of an actual
pixel:
For the details behind this data see Aptina DR-Pix Technology White Paper.
The x-axis is light (photons) reaching the pixel. And the y-axis is the voltage
at the Floating Diffusion (FD) node in the pixel.
Ultimately the FD Signal voltage will be converted to the Digital Number (DN)
we can observe in the raw sensor data.
Note that the linear portion of the responsivity is shown
with circle symbols and the non-linear portion with square symbols.
The red dotted line shows a linear fit to the circles which is quite good with
an R2 value of 0.9994
Although the non-linear portion is sometimes used to maximize dynamic range in
the remaining figures we'll assume operation only in the linear range.
Expected Variations in Responsivity
Because not all pixels are perfectly identical there are two primary sources of response variation that we can expect.
Not all pixels will have a zero response at an exposure of
zero; this is Dark Signal Non-Uniformity (DSNU).
With DSNU the y-intercept of Response versus Exposure is shifted up or down.
The figure to the right shows the detail near the origin.
In both cases DSNU has been exaggerated for clarity since DSNU is normally
quite small.
Also, the response of each pixel varies slightly; this is
Photo-Response Non-Uniformity (PRNU).
With PRNU the slope of Response versus Exposure varies.
Most pixels are affected by both DSNU and PRNU.
Even the combined effect of DSNU and PRNU rarely has a visible impact on an
image.
Unexpected Variations in Responsivity
In digital photography we expect every pixel to respond in a
uniform linear fashion to light.
(We will disregard the fact that this response is actually somewhat dependent
on wavelength as well.)
When a pixel behavior is not as expected it is defective, or in common
parlance, "bad".
Using our Response versus Exposure graph here is a simplistic depiction of some
defect scenarios.
In my experience hot pixels are the most common but cold pixels are not that
unusual.
Totally dead or stuck pixels are quite rare; and I have even seen cases where
the response is not continuous.
Visual Appearance of Defect Pixels
Defect pixels are only a practical problem if they are visible
in normal images.
Because demosaicing consults neighboring pixels, a single defect pixel will
affect multiple pixels in the final image.
Here's a Nikon D500 image and a 100% zoom of a portion of the grassy area in an
image. Note the reddish-brown dot.

Here's that same pixel in that image at
1600% and in a separate magenta test image taken with the same camera, also at
1600%:
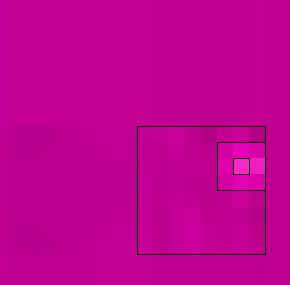
Magenta is a good color for test images because it more evenly exposes the red,
green, and blue photosites than a gray image.
The innermost black square indicates the defect pixel location.
The surrounding 3x3 square are the immediate neighbors that are clearly
affected.
Beyond that we see artifacts in the 8x8 block due to JPEG compression which
even seems to slightly affect the 8x8 block to the left.
Ad Hoc Detection of Defect Pixels
The vast majority of people try to identify defect pixels
using black frames of long duration at high ISO settings.
These attempts are misguided but understandable since taking such a black frame
is simple and better analysis tools require additional software aren't widely
known.
Black frame methods will miss dead or cold pixels; and hot pixels may be
difficult to differentiate from normal noise.
Statistical Detection of Defect Pixels
Pixel response ought to be uniform for a uniform exposure so
our detection test target is an evenly illuminated bright uniform image.
Because there is noise, primarily photon noise; we would expect a histogram of
the response (in DN) to form a normal distribution.
To detect defect pixels we compute a z-score for each pixel; the z-score is the
number of standard deviations the pixel value is from the expected value.
This z-score gives us an indication at to how likely a variation from the
expected value is simply random noise as opposed to being a defect.
In practice our test target will be imperfect with light
falloff and perhaps a gradient.
My implementation of the detection algorithm divides the image into a fairly
fine grid; the average and standard deviation is computed for each grid
position.
The pixel z-score is computed using the average and standard deviation for the
grid position it occupies.
Here are the results from a Nikon D500:
Certainly the center region looks "perfect"; let's look more closely
at the tails:
This also looks quite good.
In fact, we can push our luck, so to speak.
This histogram comprises 20,876,800 pixels and a probability of 1/20876800
corresponds to 5.65 standard deviations which agrees quite well to the observed
data.
I normally use a more conservative 8 standard deviation threshold to declare a
pixel as defective.
Due to noise the z-score for a particular pixel can vary
considerable from image to image. Once again we would expect a normal
distribution.
Here's an example of one pixel samples 1000 times:
The average z-score is about -0.473 due to the combined
effects of DSNU and PRNU (primarily PRNU with this bright exposure).
The spread is not at all surprising and does seem to follow the normal
distribution pretty well considering the small sample size.
Defect Pixel Example
Here is the diagnostic report for the defect pixel shown
earlier in this article.
This color-coded report helps us visualize the problem and to quantify the
defect which is over 27 standard deviations away from the norm.
A single "hot" pixel is responsible for the effect we saw above.
Defect Pixel Suppression
Many camera models attempt to repair defect pixels; those
mechanisms are beyond the scope of this article.
For example, most Nikon camera exhibit no defect pixels although even Nikon
cameras sometimes show them as demonstrated above.
Conclusion
Pixel response is well understood and highly repeatable.
Statistical methods can be applied to detect defect pixels with a response that
lies outside what is expected.